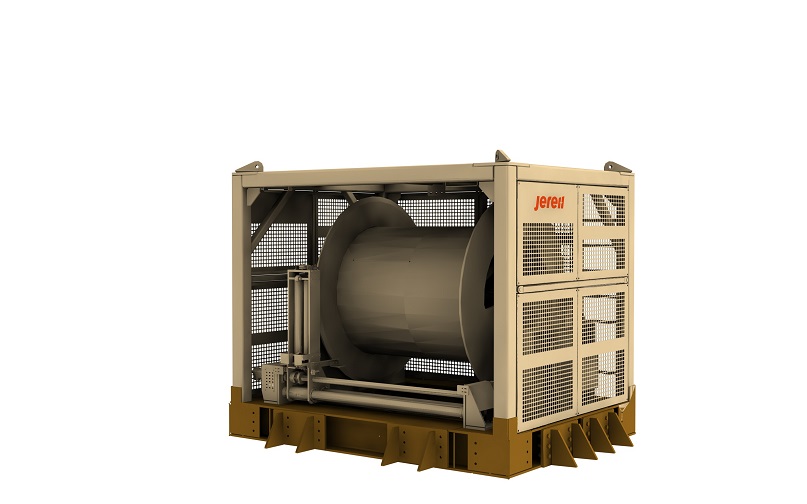
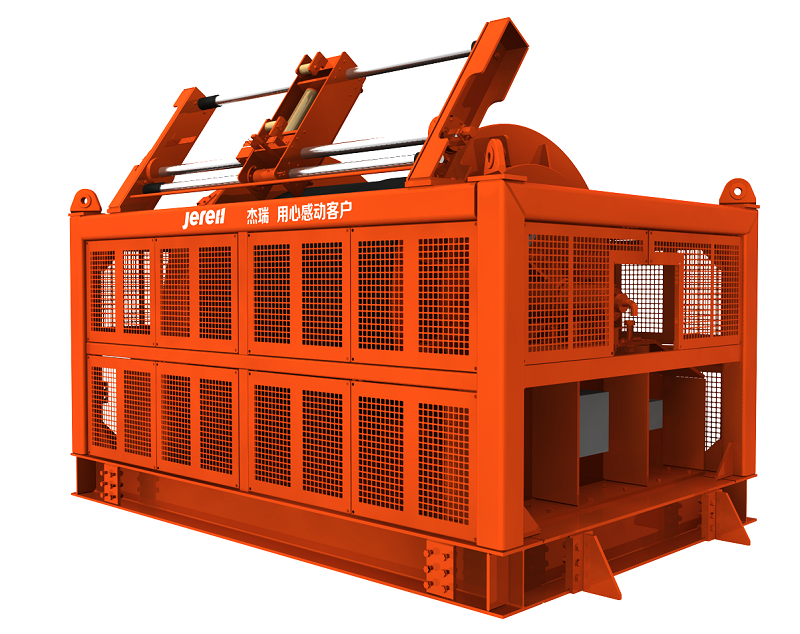
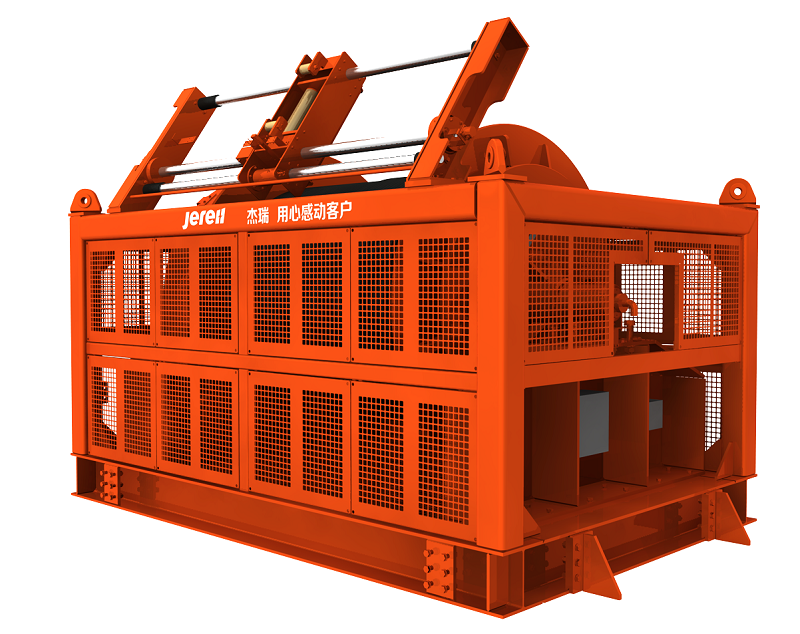
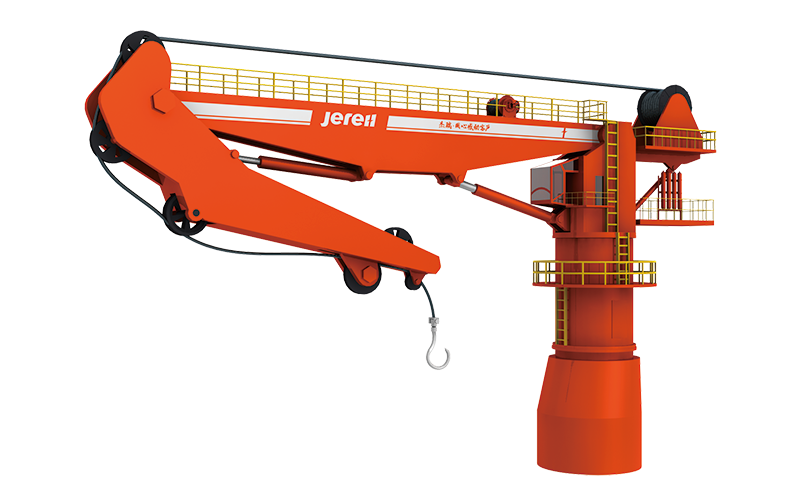
The ROV Launch and Recovery System (LARS) controls therelease and recovery of the umbilical cable, enabling underwater equipment tomove from the mother vessel to overboard (or vice versa). This systemfacilitates the launch and recovery of underwater equipment between the deckand the water surface. The system consists of three main modules: the A-frame,winch, and HPU. The entire system is designed according to DNV standards andhas obtained DNV classification certification, allowing stable operation in seaconditions up to Sea State 6. The entire
operation is conducted via wireless remote control,ensuring ease of operation, efficiency, and safety.
Features
• The snubber can be designed with six functions based on actual workingconditions: heave, pitch, roll, compression, locking, and telescoping, ensuringreliable operation in harsh marine conditions.
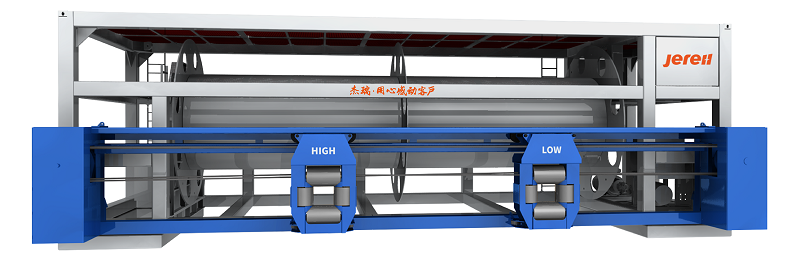
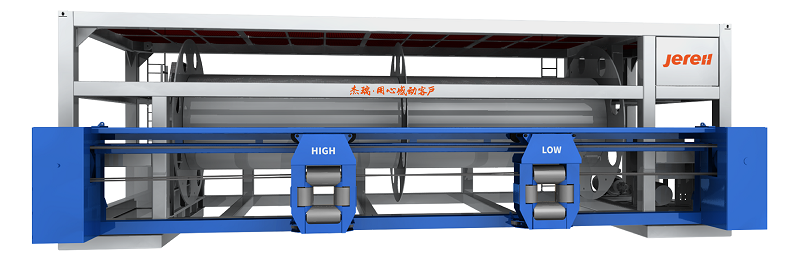
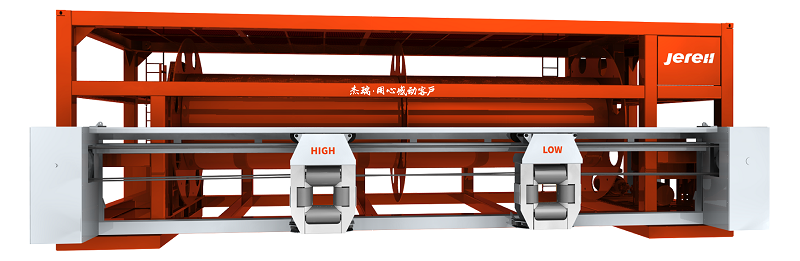
• It features two modes for cable handling: automatic and manual. Pairedwith a winch drum with a dual-fold line groove (LEBUS), it ensures theumbilical cable is neatly and tightly arranged.
• Equipped with both remote waist-mounted controllers and a local controlpanel, enabling remote and local control options.
• Includes cable payout and retrieval counting functions, as well aspressure monitoring, allowing real-time tracking of descent depth and loadweight.
• The hydraulic power unit uses a dual-motor, dual-pump drive system, with asingle motor capable of retrieving or deploying the ROV.
• The A-frame can be customized in modular or telescoping designs, savingtransportation dimensions and deck space.